Welcome to a tutorial on SpiNNaker
These pages provide a walkthrough on the configuration of a simulation environment based on the SpiNNaker neuromorphic board. The instructions mostly pertain to the use of PyNN with the 48-chip SpiNNaker #1 board (i.e. spinn5).
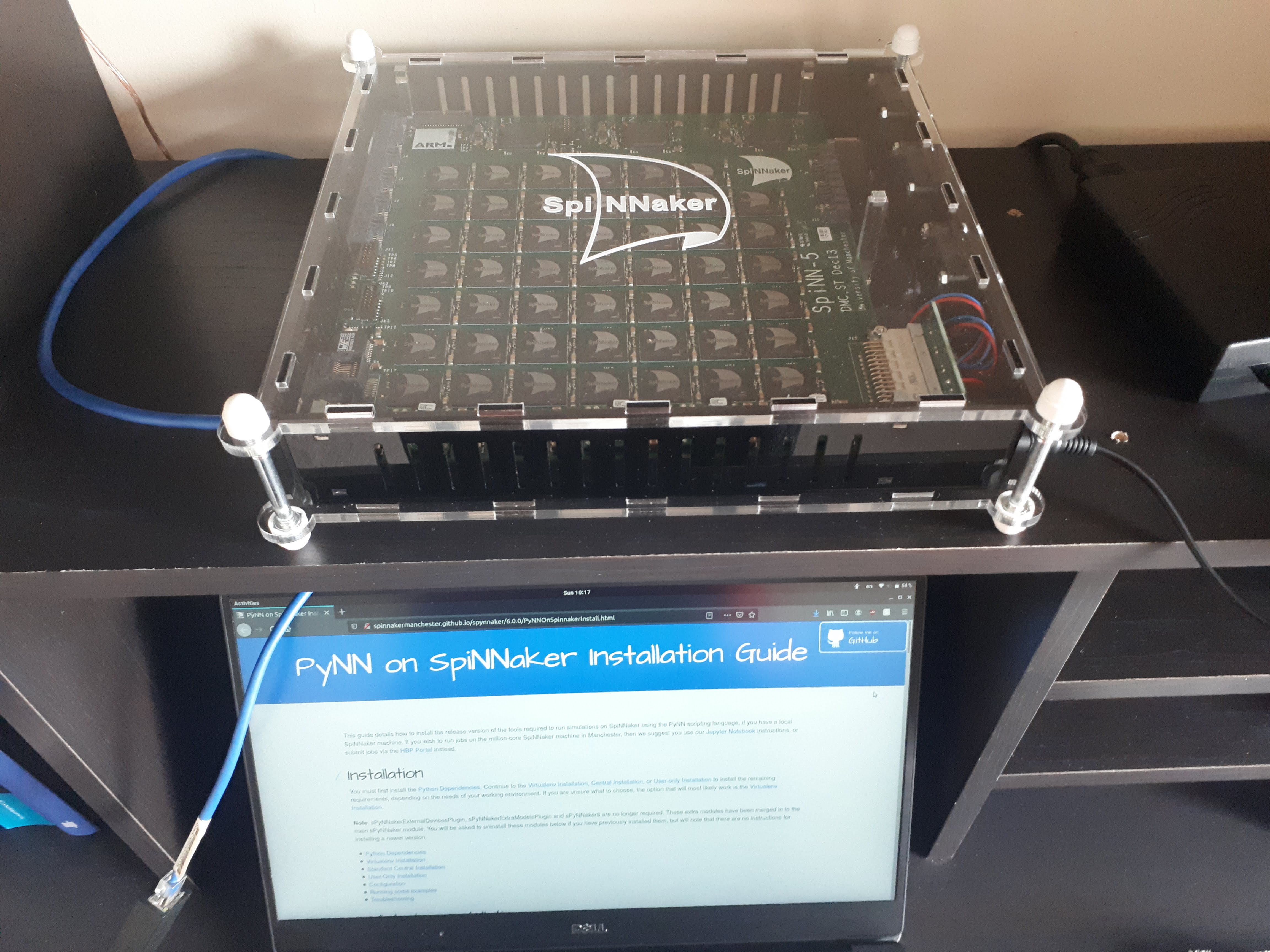
Complementary information regarding the 4-chip version can be found in the official SpiNNaker Installation Guide. This tutorial provides a condensed version of the instructions found on those pages targeting Ubuntu workspaces (Ubuntu 18.04 LTS).
Contents
About
This tutorial stems from research collaboration at the University of Toronto at the intersection of computational neuroscience and robotics. While currently under development, these tutorial pages aim to:
- provide a getting-started guide on how to use the SpiNNaker board with PyNN
- offer some examples of the modelling advantages (and limitations) of the SpiNNaker #1 system
- explore closed-loop neuroscience with applications to deep brain stimulation (DBS)
- explore the integration of the SpiNNaker system with robotic tools (e.g. ROS, NRP)